
0
Nova tecnologia pode substituir as rodas no futuro
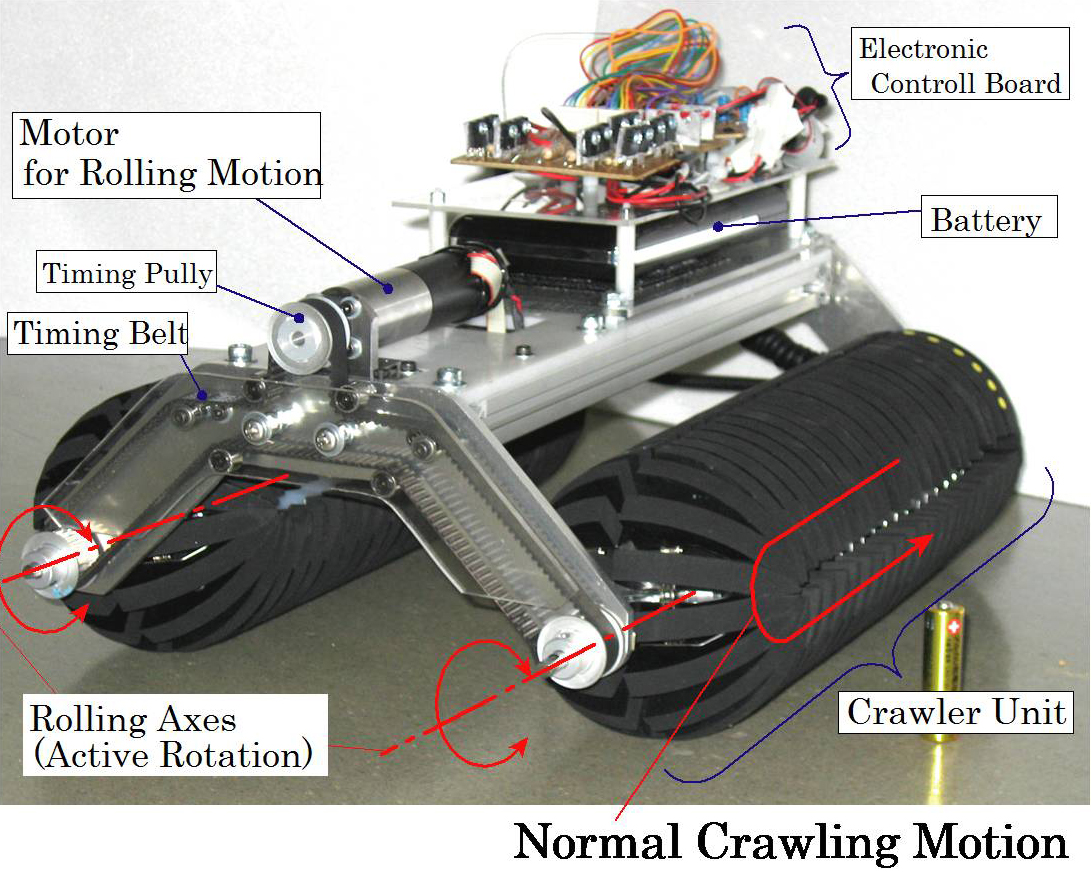 Um grupo de pesquisadores japoneses da Universidade de Osaka apresentou durante o evento Innovation Japan 2011 um veículo equipado com sistema de locomoção capaz de guiá-lo em qualquer direção, com economia de movimentos e energia.
Um grupo de pesquisadores japoneses da Universidade de Osaka apresentou durante o evento Innovation Japan 2011 um veículo equipado com sistema de locomoção capaz de guiá-lo em qualquer direção, com economia de movimentos e energia.O Omni-Crawler possui como premissa de movimento o conceito da Omni-ball, que nada mais é do que uma bola composta por duas metades capazes de viabilizar movimentos em todas as direções, graças à independência de cada parte.
Com o emprego dessa tecnologia, o Omni-Crawler mostra-se um protótipo bastante competente em movimentar-se por toda a área, inclusive lateralmente, que equivaleriam no dia a dia a estacionar um carro com grande conforto. E melhor: com menor dispêndio energético, verificado nas mudanças de direção do veículo.
Levando o conceito adiante
Kenjiro Tadakuma, professor assistente da Universidade de Osaka, afirma que outros projetos já receberam uma ajudinha do conceito de movimento multidirecional da Omni-ball, como um protótipo de robô para explorações extraterretres composto por três mecanismos de movimento Omni-Crawler.
Eles foram capazes de dar ao veículo acesso a locais de difícil alcance, como subidas íngremes e locais com obstáculos. Outro uso envolvendo as três porções de movimento foi em uma mão biônica, que recebeu a área de movimentação do Crawler no local em que seriam as pontas do dedo, dando ao bot grande capacidade de manipular diferentes formatos de objetos.
Apesar de todos os benefícios já gerados pela tecnologia Omni-ball, os engenheiros afirmam que, por mais que ela seja uma boa ideia, é somente um primeiro passo na busca de cada vez mais otimização de movimentos em estruturas, como na viabilização de um robô cirurgião capaz de realizar procedimentos com precisão e segurança perfeitas, o próximo alvo da equipe.
|














Postar um comentário